全速自适应巡航是控制汽车车速的,并不会自己转弯。全速自适应巡航其实是自适应巡航的一个延伸,车辆能够提供全时速范围内的自适应巡航功能,可以直接代替驾驶员来控制汽车车速,避免了驾驶员频繁取消和设定巡航控制,使巡航系统能适用于更多的路况。
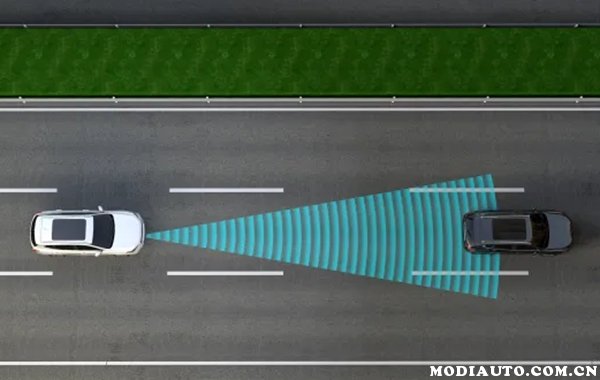
当车辆的自适应巡航开始工作的时候,就会通过车头前的雷达或红外线光束等多个传感器来监测前车车辆的具体位置,如果发现前方车辆减速或监测到有其他障碍信息的时候,就会将信息反馈给行车电脑,从而让车辆减速以保持安全的行车距离。
如果监测到前方并没有车辆,或前方车辆变道行驶了,自适应巡航系统又会让车辆根据设定的安全车速行驶,而且车头前的雷达会实时监测前方道路情况,然后根据实际的路况对车速进行调整。

全速自适应巡航是一种更加智能轻松的驾驶方式,但相比于一个灵活操作的驾驶员来说,全速自适应巡航的这种设置还是太过于死板了,之前也出现过因为没有掌握好全速自适应巡航操作,而差点害死人的事故。但这也并不代表所有的全速自适应巡航都会出现这种现象,这也只是少数现象而已,我们还是应当客观看待。

全速自适应巡航的优缺点
1、优点
(1)全速自适应巡航可以实现全时速范围内的巡航功能,不受车速的影响;
(2)实现了跟车功能、城市道路自动排队功能等;
(3)出于驾驶安全的考虑,全速自适应巡航在设定与前车的跟车范围是150米。
2、缺点
(1)因为全速自适应巡航就是通过车头雷达等多个传感器来判断前方是否安全,一旦传感器出现故障或反应慢了,就很容易造成事故;
(2)如果系统出现故障,全速自适应巡航也就失效了,这时就会影响到新车安全了。